AIVEX تدخل الذكاء الاصطناعي الفيزيائي إلى أعمال تغليف مصانع البطاريات الكورية
قالت AIVEX إن منصة AIbot أتمتت عملية إزالة تغليف البوتقات لدى شركة كورية رائدة في مواد البطاريات. يجمع النظام بين الرؤية بالذكاء الاصطناعي والبصريات ثلاثية الأبعاد وتقدير الوضعية وتخطيط المسار للتعامل مع حبال وأغلفة غير منتظمة. ويشير التطبيق إلى انتقال الذكاء الاصطناعي الفيزيائي إلى مهام مصانع متكررة لكنها شديدة التغير.

ما الذي حدث
قالت شركة AIVEX الكورية المتخصصة في الذكاء الاصطناعي الفيزيائي الصناعي إنها نشرت نظام أتمتة غير مأهول لعملية إزالة التغليف لدى شركة محلية رائدة في مواد البطاريات. يستهدف المشروع منصات البوتقات المستخدمة في إنتاج مواد الكاثود، حيث يجب إزالة طبقات التغليف والحبال قبل الانتقال إلى خطوة التصنيع التالية.
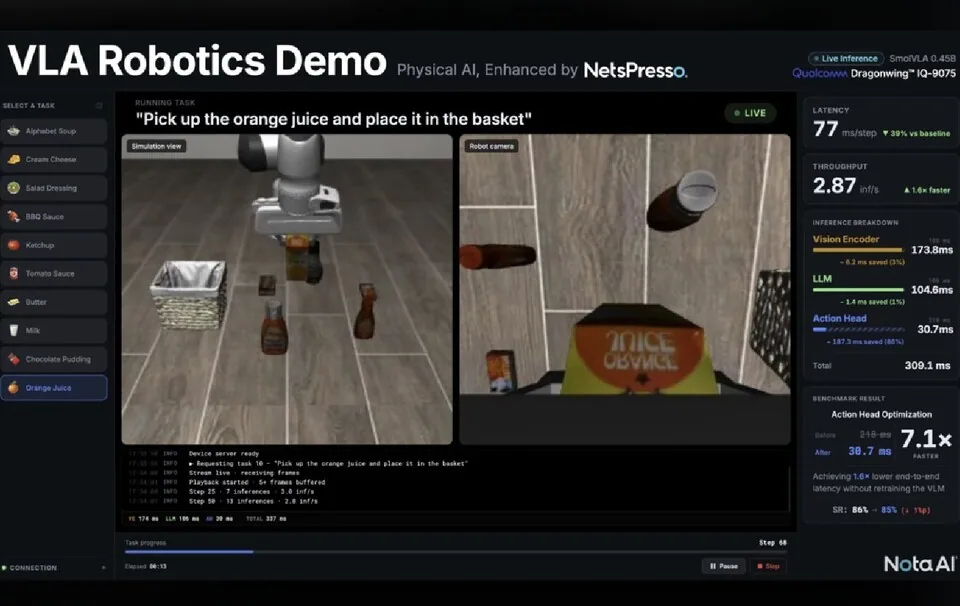
وذكرت الشركة أن منصة التحكم الروبوتية AIbot تتعرف على الحبال، وتكشف نقاط التقاء الحبال، وتحدد اتجاه الحبال العمودية، وترصد مواقع قطع الدعم، وتصحح انحرافات موضع البوتقة، وتولد مسارات قطع التغليف، ثم تفحص النتيجة بعد القطع. وتصف AIVEX المنصة بأنها مبنية على ROS2 وتستخدم أنظمة رؤية ثنائية وثلاثية الأبعاد من نوع hand-eye، وحواسيب Nvidia Jetson، ونماذج ذكاء اصطناعي، وتقدير الوضعية ثلاثي الأبعاد 6D Pose Estimation، وتوليد مسارات الروبوت آلياً، والاتصال بالأجهزة المحيطة.
لماذا يهم ذلك
الإشارة هنا لا تقتصر على تركيب روبوت آخر داخل مصنع. تقدم AIVEX المشروع كحالة استخدام للذكاء الاصطناعي الفيزيائي في أعمال غير منتظمة ومتعددة المواد، وهي أعمال كانت الأتمتة الثابتة تواجه صعوبة في التعامل معها. ويقول المصدر إن أتمتة منصات البوتقات كانت صعبة سابقاً لأن مواقع المنتجات لم تكن ثابتة، ولأن عدد الحبال ومواقعها واتجاهاتها كان يختلف من منصة إلى أخرى.
وهذا قد يهم المصنعين لأن كثيراً من أعمال التغليف واللوجستيات متكررة لكنها ليست منظمة بالكامل. فإذا تمكنت الرؤية المعتمدة على الذكاء الاصطناعي وتخطيط المسار في كل دورة من التعامل مع هذه التغيرات، فقد تنتقل مزيد من مهام المصانع من العمل اليدوي إلى التشغيل غير المأهول، مع بقاء التبني مرتبطاً بظروف كل موقع وجدواه الاقتصادية.
من يتأثر
العميل المباشر هو شركة كورية غير مسماة في مواد البطاريات. وقالت AIVEX إن التطبيق حقق أتمتة غير مأهولة بنسبة 100 في المئة لعملية إزالة تغليف البوتقات، ومكّن التشغيل المستمر على مدار 24 ساعة، وخفض حوادث سلامة العمال إلى الصفر، وحافظ على زمن العملية ضمن 14 دقيقة.
وتولت AIVEX التعرف البصري، والحكم المعتمد على الذكاء الاصطناعي، وتوليد المسارات آلياً. أما الشريك فتولى عتاد الروبوت، والقابض، وإدارة مشروع المعدات بالكامل.
ما الذي ينبغي مراقبته لاحقاً
السؤال التالي هو ما إذا كانت الطلبات المشابهة من عملاء آخرين ستتحول إلى تطبيقات متكررة. وقالت AIVEX إنها تتلقى مزيداً من الاستفسارات عن مشاريع مماثلة، وتخطط لتوسيع الحل إلى لوجستيات التغليف على مستوى المنصات في مواقع التصنيع.
كما ينبغي متابعة قدرة منصات الذكاء الاصطناعي الفيزيائي على الحفاظ على أداء مستقر عندما تتغير الإضاءة وشفافية المواد ومواضع الأجسام. وقالت AIVEX إنها استخدمت بصريات ثلاثية الأبعاد وخوارزميات ذكاء اصطناعي وشبكتها الخاصة للتعرف على الحبال الشفافة جزئياً والصناديق وطبقات التغليف بعدد محدود من صور التدريب.
Summary version for Medium
AIVEX Brings Physical AI Into Korean Battery-Plant Packaging Work
What the announcement means beyond the headline
Quick Summary: AIVEX said its AIbot platform automated a crucible packaging-removal process at a leading Korean battery-materials company. The system combines AI vision, 3D optics, 6D pose estimation and automatic path planning to handle irregular ropes and wrapping film.
What happened
AIVEX, a Korean industrial physical AI company, said it has deployed an unmanned automation system for a packaging-removal process at a leading domestic battery-materials company. The project targets crucible pallets used in cathode-material production, where wrapping film and ropes must be removed before the next manufacturing step.
Why it matters
The signal is not just another factory robot installation.
- Point 1: The central topic is AIVEX, with the announcement framed around concrete operating detail.
- Point 2: AIVEX is presenting the project as a physical AI use case for irregular, mixed-material work that fixed automation has struggled to handle.
The important shift is not the AI label, but the operating boundary it creates for teams.
Who is affected
The immediate customer is an unnamed Korean battery-materials company. AIVEX said the deployment achieved 100 percent unmanned automation for the crucible packaging-removal process, enabled 24-hour continuous operation, reduced worker safety accidents to zero and kept takt time within 14 minutes.
Read the Full Deep Dive
Want to explore the complete technical analysis, enterprise trade-offs, and detailed metrics?
Read the full article originally published at SendTech Times