نوتا تشغل نموذج روبوتات VLA في الوقت الحقيقي على عتاد كوالكوم الطرفي
عرضت نوتا تشغيل نموذج روبوتات يجمع بين الرؤية واللغة والفعل في الوقت الحقيقي على عتاد Qualcomm Dragonwing للذكاء الاصطناعي الطرفي. وخفضت الشركة زمن معالجة رأس الفعل من 218 ملي ثانية إلى 31 ملي ثانية مع بقاء معدل نجاح المهمة شبه ثابت. ويشير العرض إلى مسار لأنظمة الذكاء الاصطناعي الفيزيائي التي تعمل قرب الروبوتات بدلا من الاعتماد أساسا على خوادم GPU أو السحابة.
نوتا تشغل نموذج روبوتات من نوع VLA في الوقت الحقيقي على عتاد كوالكوم الطرفي
قالت شركة نوتا الكورية الجنوبية المتخصصة في تحسين الذكاء الاصطناعي إنها عرضت تشغيلا فوريا لنموذج رؤية ولغة وفعل على جهاز ذكاء اصطناعي طرفي، في مؤشر إلى إمكانية نقل أعباء الذكاء الاصطناعي الفيزيائي إلى مواقع أقرب من الروبوتات والأنظمة الذاتية.
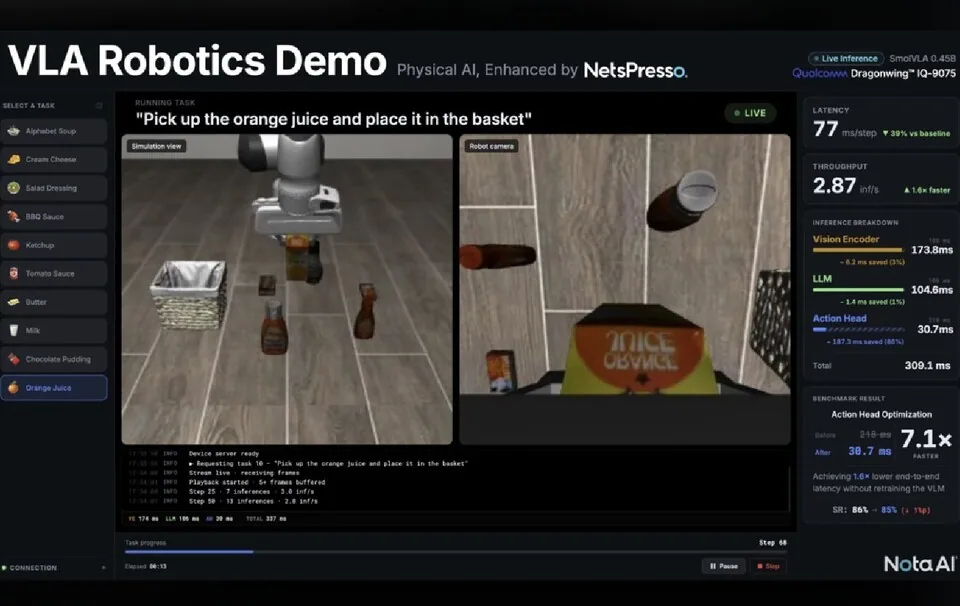
قدمت الشركة العمل في قمة Embedded Vision Summit 2026 في سانتا كلارا بولاية كاليفورنيا. واستخدم العرض جهاز Qualcomm Dragonwing IQ-9075 لتشغيل نموذج SmolVLA 0.45B المخصص للروبوتات، وهو نموذج يربط بين الإدراك البصري وفهم اللغة وتوليد الأفعال.
تعد نماذج VLA مهمة للذكاء الاصطناعي الفيزيائي لأنها تتيح للنظام رؤية البيئة، وفهم التعليمات باللغة الطبيعية، وتحويل هذه المدخلات إلى حركة. لكن هذا العبء المشترك يتطلب قدرة حوسبة كبيرة، وما زالت كثير من التطبيقات تعتمد على خوادم GPU أو البنية السحابية بدلا من الأجهزة المدمجة.
تحسين انتقائي بدلا من ضغط النموذج بالكامل
قالت نوتا إن نهجها لم يعتمد على ضغط النموذج بأكمله. فقد أبقت مرحلتي الإدراك البصري وفهم اللغة كما هما، وركزت التحسين على رأس الفعل، وهو الجزء الذي يولد أوامر حركة الروبوت.
واستخدمت الشركة تقنيتين: تحسين الاستدلال في الوقت الحقيقي لتقليل العمليات المتكررة، وتحسين الرسم البياني المعتمد على NPU لإعادة تصميم تدفق العمليات بما يلائم بيئة التشغيل الطرفية من كوالكوم.
وكانت النتيجة خفض زمن معالجة رأس الفعل من 218 ملي ثانية إلى 31 ملي ثانية. ويمثل ذلك انخفاضا بنسبة 85.8% وتحسنا في السرعة يصل إلى سبعة أضعاف. كما انخفض زمن الاستدلال الإجمالي من 505 ملي ثانية إلى 310 ملي ثانية، بينما تغير معدل نجاح المهمة بشكل طفيف فقط من 86% إلى 85%.
أهمية ذلك للذكاء الاصطناعي الفيزيائي
في القمة، اختار الزوار عناصر مختلفة، وتعرف النموذج المحسن عليها في الوقت الحقيقي، ثم وجه ذراع روبوت لوضعها في سلة. وقالت نوتا إن العرض لم يكن فيديو مسجلا أو سيناريو ثابتا، بل اتخذ الذكاء الاصطناعي قراراته في الموقع وفقا لاختيار كل زائر.
تدعم النتيجة حجة نوتا بأن الذكاء الاصطناعي الفيزيائي الصناعي يحتاج إلى نماذج تعمل بسرعة وموثوقية على الأجهزة الطرفية. وتربط الشركة هذا العمل بالطلب في مجالات الذكاء الاصطناعي على الجهاز، ومراكز البيانات، والذكاء الاصطناعي الفيزيائي.
وسجلت نوتا إيرادات موحدة بلغت 3.58 مليار وون في الربع الأول من 2026، مقارنة بنحو 67 مليون وون قبل عام. وبلغ سجل الطلبات المتراكمة نحو 12.1 مليار وون في نهاية الربع. وقال الرئيس التنفيذي تشاي ميونغ-سو إن تحسين نموذج VLA يظهر أن تقنية نوتا يمكن أن تصبح أساسا مهما لاعتماد الذكاء الاصطناعي الفيزيائي في البيئات الصناعية.
Summary version for Medium
Nota Runs VLA Robotics Model in Real Time on Qualcomm Edge AI Hardware
What the announcement means beyond the headline
Quick Summary: Nota demonstrated real-time operation of a vision-language-action robotics model on Qualcomm Dragonwing edge AI hardware. The company reduced the model action-head processing time from 218 milliseconds to 31 milliseconds while keeping task success nearly unchanged.
Nota runs a VLA robotics model in real time on Qualcomm edge AI hardware
South Korean AI optimization company Nota says it has demonstrated real-time operation of a vision-language-action model on an edge AI device, showing how physical AI workloads could move closer to robots and autonomous systems. The company presented the work at Embedded Vision Summit 2026 in Santa Clara, California.
Selective optimization instead of full compression
Nota said its approach did not compress the entire model.
- Point 1: The central topic is ai, with the announcement framed around concrete operating detail.
- Point 2: It kept the visual perception and language understanding stages intact and focused optimization on the action head, the part that generates robot movement commands.
The important shift is not the AI label, but the operating boundary it creates for teams.
Why it matters for physical AI
At the summit, visitors selected items and the optimized VLA model recognized them in real time, then directed a robot arm to place them in a basket. Nota said the demonstration was not a replayed video or fixed scenario; the AI made decisions on site according to each visitor's choice.
Read the Full Deep Dive
Want to explore the complete technical analysis, enterprise trade-offs, and detailed metrics?
Read the full article originally published at SendTech Times